Pedestrian Intention Recognition
WP2 is further working on modelling the human-human interaction and the improvement of sensor algorithms (CARTRE Webinar) to detect the intentions of pedestrians. In WP 2.3 “Detecting interaction features and intention recognition development” led by BOSCH the partners are working among others on the motion prediction of pedestrians, facing the challenge that pedestrians can abruptly change their motion plans in less structured environments. We apply controlled Markov chains for predicting pedestrians’ motion, which takes into account their static scene understanding and interaction with other traffic participants. Our approach yields accurate spatiotemporal prediction with detailed information about where the pedestrian will be and when with corresponding probabilities; thus, the pedestrian intention recognition lies under those spatiotemporal results. This approach is beneficial for the motion planning of highly automated vehicles.
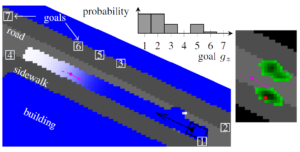
As depicted in the figure below, we first infer several potential goals of a pedestrian (magenta square) for a real world scenario from a semantic map. Then the probability distribution of those goals is estimated using the observed trajectory (dashed magenta line). Based on the initial position and velocity (magenta arrow) of the pedestrian as well as his goals, and by considering an oncoming vehicle, his predicted probabilistic occupancy (green cells) in 3 seconds is shown in the right part of the figure. Details can be found here